读论文写代码有感,当我们从隐空间的角度看待动画,很多动画的机器学习算法的原理就比较好理解。以及IK,传统的方法可以看成是机器学习方法的近似和简化。
动作数据在引擎内显式表示为每根骨骼的TRS(位移旋转缩放)。这样来看其维度(自由度)是12NJoints。即4x4其次矩阵去掉最后一行。如果只有旋转是3Njoints(Axis-Angle表示下)
一个观察是,这个维数是不大的,就算100跟骨骼旋转,这才300个维度。相比于图片和模型处理动不动上百万的维度,已经相当好训练和运行了。因此动画中应用机器学习进展的相当快。比如最近几年比较火的motion matching, RL生成动画等等。
另一个观察是,这么多维度中,
- 各个维度不是相互独立的,而是有相关性,结构化的。比如,手传进身体的姿势中,各个关节局部的姿势是可能的,但是整体上是不可行的。
- 各个维度有合理的取值范围。比如膝盖关节不能反向旋转,而且可以认为只有一个自由度
于是这就转化成一个机器学习问题了:怎样表示出数据的结构?如何用低维(下文称为隐变量空间)来表示数据?用低维数据之后会有什么应用?
1. 背景技术
首先我们看几个技术
1.1. Motion Matching
我们把动画表示为隐空间,同时这些隐空间维度就是用户输入。这样运行时我们可以通过隐空间中搜索最优解获得下一个动画片段。
这里隐空间维度可以有比如方向,速度,姿态,脚步位置等等。
学术界很早就有相关的研究
工业界第一次见到是UbiMTL在荣耀战魂中的应用
https://www.gameanim.com/2016/05/03/motion-matching-ubisofts-honor/
回忆下传统动画的方式
制作一些动画片段,设定一些参数作为状态机参数。参数比如可以是方向,蹲下,战斗动作等等。
运行时引擎根据用户输入改变的参数,运行状态机将动画混合到合适的片段。
和motion matching的区别主要是
参数设定上,Motion Matching是标记mocap数据。传统方法是根据经验预先定义,然后手动制作动画片段
动画片段的长度上,Motion Matching可以把动画片段打碎到很细的粒度,而传统动画需要制作较长的循环动画
动画选择上,Motion Matching根据输入参数自动搜索。传统方法需要预先定义状态机,定义动画跳转方式。
1.2. PFNN
Daniel Holden的一篇用PFNN作为角色控制器的论文。它的特殊之处在于,生成动画(骨骼数据)的神经网络的权重有一个相函数影响。
当然,神经网络的输入还包括一些输入变量,比如关节速度,高度,方向等等。相函数是脚步的相位决定的。
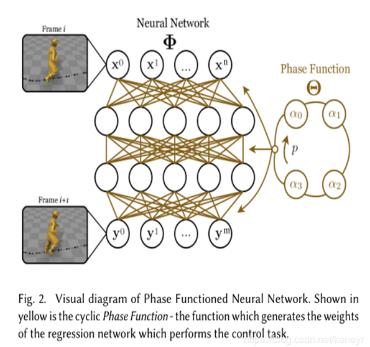
它相比于纯神经网络生成的动作,多一个相函数,考虑了双足脚运动相位的影响。
相比于motion mathing,没有动画片段的概念了,所有动画数据都被编码在神经网络权重中。
用隐空间的角度来理解,双足相位加上类似motionmationg的运动维度,就是这个隐空间的维度了。
1.3. Style IK
Siggraph 2004的文章 Style-Based Inverse Kinematics
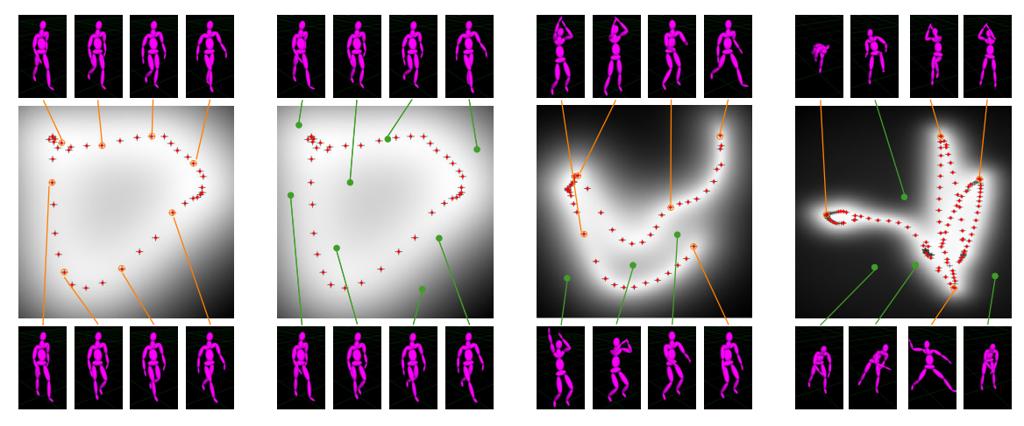
基本思想是使用SGMLVM的方法,用隐空间表示pose,学习出pose的分布密度函数。这样用一些动作集训练后分布后,再从其中采样,就可以获得合理的pose。以此为IK,求解约束条件下,隐空间中几率最高的pose,也就是ik了。
1.4. Skin Decomposition
想解决的问题是用骨骼模拟一系列顶点的运动。所以我们需要求解骨骼的权重,初始位置和动画位置,找到最佳拟合。

回顾一下这个问题,它已经给了loss function的表述了,我们完全可以用机器学习梯度下降来解它嘛。
从另一个角度来理解,他就是想给数据做降维,用隐空间表述一个全集。
1.5. SMPLify-X
这是一个单目人体姿势估计的问题。
除去CV检测关节点的部分外,另外一个问题是,怎么从2D位置估计出骨骼的3D位置?
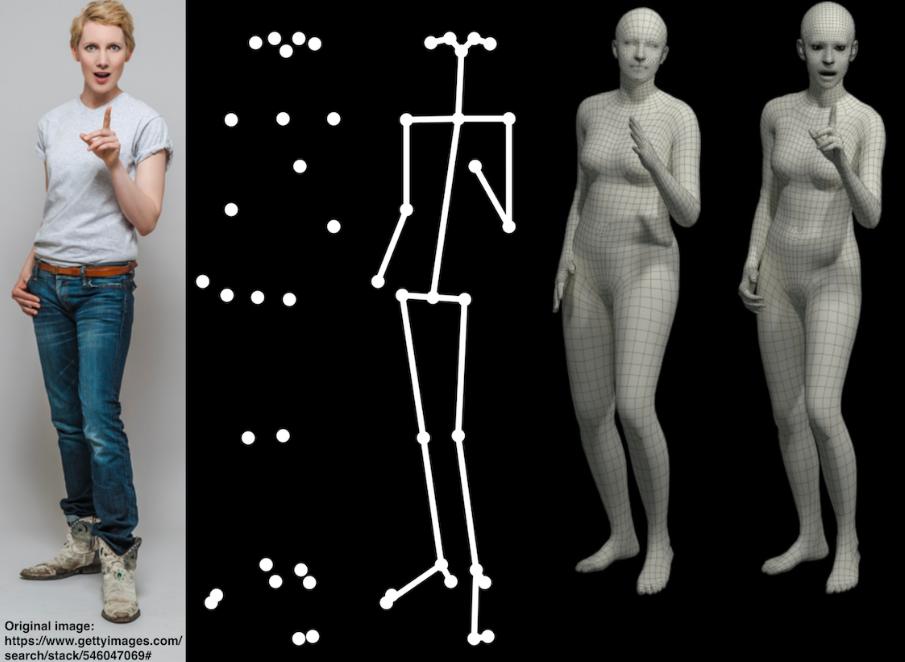
关于这个问题,我们是有先验知识的。人体的关节姿态不是任意的,而一定是服从某种分布的。
StyleIK中也涉及了这个问题,当我们知道人体姿态的分布后,就容易从2D点推断出姿态了。
SMPLX论文中,则是训练了一个变分自编码器(VAE),称之为VPoser,学习出动作空间的分布,并用隐变量表示。这就可以用在姿态预测的优化过程中了。
2. Classic IK
一个广义的IK定义是,寻找满足约束条件的骨骼pose。以此定义,motion matching,PFNN,skin decoposition, VPoser这几个,都可以认为是IK。
而一个狭义的IK定义是,给定终端节点(End Effector)的位置或旋转等,求解中间骨骼的姿态。游戏引擎中常见的手脚IK,机械臂的终端IK都是这类问题。
根据Aristidou的综述,我们可以吧IK问题分成几类:解析式的,数值式的,数据驱动的和混合式的。我们在游戏引擎中见到的基本都是数值式的方法。其中三个经典的:
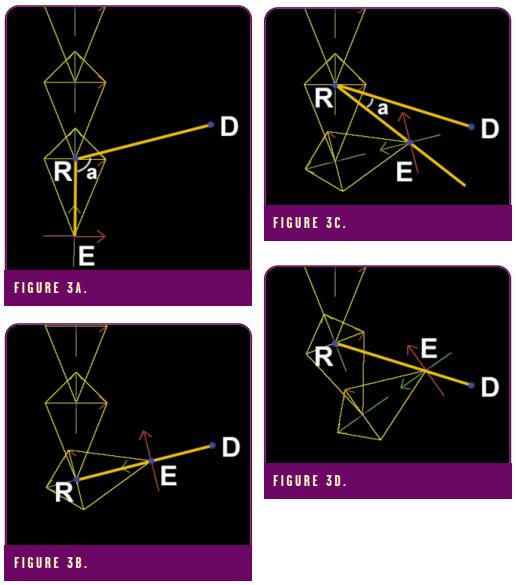
2.1. Jacobian Based
最经典的IK方法。Jacobian方法可以直观理解为求解一阶导数,当我们求解出一个运动系统的偏导数后,就可以根据导数方向改变姿态接近目标,这也就是JacobianIK的原理
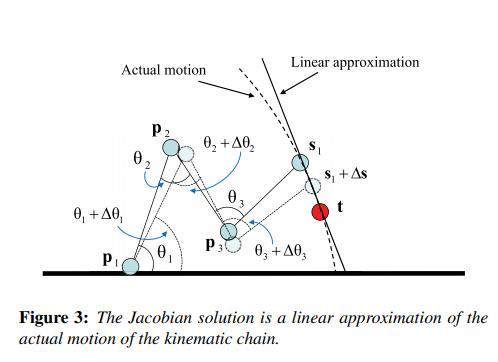
这个示意图可以看出,它只是一个一阶导数的近似。不过对于实时运动来说,一般也就够了。
2.2. CCD
CCD是一种简单的迭代IK求解器,每次只改变一个关节的旋转逼近目标。
2.3. FABRIK
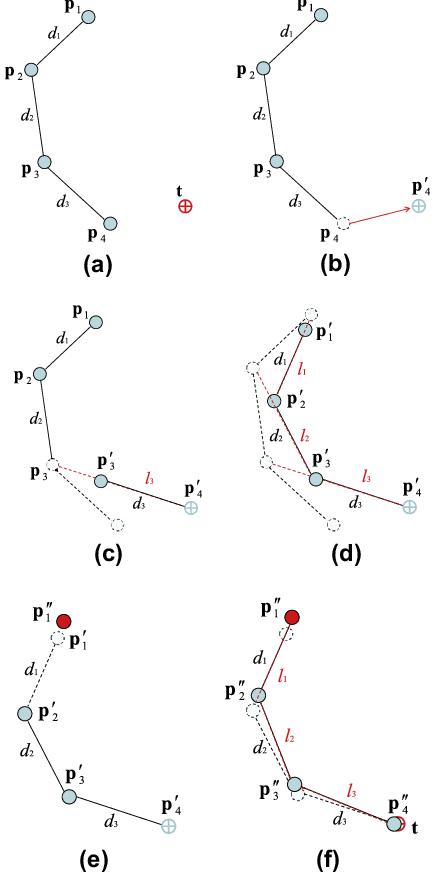
FABRIK是另一种简洁的IK求解器,不同于CCD,它更新的是节点的坐标,此外多了一份从根节点开始的pass,有正反两个pass更新坐标。
2.4 讨论
以上基本就是游戏引擎中常用的IK求解方法了。工业界基本都是这个原理了,比如我们在Unity插件FinalIK中就都有这几种IK的实现。
我们可以看到,如果把IK作为一个loss function的话,这些解法都是在尝试模拟梯度下降。比如Jacobian中,计算一阶偏导,就是近似计算梯度下降。CCD和FABRIK中用的贪心的方法,迭代求解的每一步都在计算局部最佳梯度。
像极了实时图形学中各种模拟的trick。不完全正确,但我们考虑的不是正确与否而是好坏。
所以这样做的目的是什么?
- 快速。达到实时要求。
有什么代价?
- 当然有,IK计算会产生错误。
错误在可接受范围内,或者错误重要吗?
- 大部分情况下可接受,肯定有corner case
3. Data-Driven IK
我们再次从机器学习角度考虑狭义的IK这个问题,即,怎么让关节达到目标位置。
面对这个优化目标,我们当然可以直接对关节旋转做梯度下降。不过,这样会有个问题。我们可以保证姿态达到目标,但是怎么保证姿态是合理的?
StyleIK和VPoser给出的思路是,我们预先训练模型学习出姿势的分布,然后找到满足IK要求的姿态中,最合理的一个就好了。
至于怎样学习出姿势的分布?有很多种方法啦。StyleIK用的一个Scaled Gauss Process Latent Variable Model,将姿态转换到隐空间分布。在这个隐空间中是一个高斯分布,因此可以采样出姿态的概率。VPoser训练了一个VAE,思想也是将姿态编码到一个隐空间中,之后就可以从这个隐空间中采样姿态。VAE中隐空间参数满足高斯分布,也因此可以得到参数概率的高低。
我们将隐空间参数的概率作为loss function的一项,参与到IK梯度下降迭代求解中,就相当于能找到即满足IK要求又合理的姿势了。
4. Implementation
具体到代码上,我们怎么实现呢?
4.1 Pose表示
首先数据来源于CMU Mocap Data,我们需要把bvh数据表示为关节旋转数据。
我们可以用任意DCC软件,笔者这里直接选择使用blender了。导入bvh数据后就可以导出关节的旋转数据了。
我们翻一下Blender的文档,可以看出它有Bone和PoseBone两个类型。
https://docs.blender.org/api/current/bpy.types.PoseBone.html
https://docs.blender.org/api/current/bpy.types.Bone.html
前者可以理解为RestPose,而后者是带动画的状态。我们从posebone中使用matrix_basis属性就可以拿到局部坐标系下的旋转数据了。
大概如下:
1 | anim_data = np.zeros((len(keys)-1, len(mapping.keys()),3,3)) |
当然到此只能处理一个BVH文件,我们要让blender批处理导入到处,用命令行模式就行
注意命令行模式python脚本可以接受到argument的,所以我们可以批量执行
blender –background -P data/bpy_import_bvh_and_convert.py –bvh
4.2 Pytorch中骨骼变换
参考SMPL-Torch中的写法,不过我们只需要骨骼变换不需要蒙皮等等操作。另外SMPL中不关心单个骨骼的局部坐标系,每根骨骼的坐标系都认为是世界XYZ。我们不能这样简化,因为我们在DCC中需要拿到的是骨骼局部坐标系下的旋转。
回顾变换的原理,其中poseLocalRotation是特定姿势下局部旋转
boneObjectTransform = parentObjectTransform * boneRestLocalTransform * poseLocalRotation
boneRestLocalTransform这项可以在blender里通过
bone.parent.matrix_local.inverted()@bone.matrix_local 拿到。
这里需要注意的是,它bone.matrix和bone.tail和bone.head没太搞清楚怎么能计算出这个局部变换,但反正我们可以用上面方法整体计算就好了嘛。
所以pytorch里面
parent是一个父子骨骼id表,我们只要保证每一个骨骼的父骨骼id比自己小,就能遍历所有骨骼id求出所有骨骼的objectTransform。这是因为,计算到某根骨骼时,它父骨骼id比它小,所以已经计算过了,就可以拿出来算自己的变换了。
这里J就是每个骨骼的restLocalTransform
localRot是一个nnParameter,表示骨骼旋转角度,它在pytorch中设为可微的。
1 | root = torch.matmul(J[:,0], localRot[:,0]) |
4.3 训练
数据只用了CMU Mocap Data的01-09这几个类别,算下来有80k的pose作为训练集,20k测试集,10k验证集。
RTX2070上训练,一个Epoch不到1分钟。初始lr1e-2, 200个Epoch基本效果就差不多了,loss到0.3.
最后模型大小是2.9M,当然其中可能超过一半的参数都在encoder中,我们预测只需要decoder,也就是说还有很多压缩的空间。
4.4 预测阶段
我们希望Blender拿过来的参数包括目标骨骼ID和目标骨骼位置,预测出每个骨骼的旋转值和根节点位移。
我们固定一个lr=2e-1, 迭代次数100,基本都能达到一个比较好的效果。优化部分核心代码如下,可以看出loss function是两部分:1. 骨骼节点位置的距离 2. 姿势隐空间变量的概率。因为隐变量是中心为0的高斯分布,我们直接平方出来可以近似一个概率密度的。
1 | for it in range(0, iteration): |
当然,减小lr,提高迭代次数可以让结果变精确,不过当前这套参数表现也差不多,速度CPU上运行一次计算大约1.2s左右。
4.5 Server-Blender
下一个问题是,blender里怎么用pytorch?
当然有人直接能把pytorch装在blender里,不过配环境可太麻烦了。
这里我们直接部署一个flask服务器,开放一个RESTFUL API给blender调用就好了。
当然坏处是增加了通信和数据解析的成本,不如blender直接带pytorch这样全是内存数据交换。不过对我们也够用了。
一个10行极简的框架就这样,用全大写表示伪码的部分
1 | app = Flask(__name__) |
为什么这里使用Vposer?因为它有源码我们可以借鉴。
5. 讨论
这种技术的应用场景在哪里?实时的话太慢了,生产的话大部分动画都能动捕,还需要IK做什么呢?
看上去只能用在手工Keyframe动画,用于无法动捕的动画生产。比如不好动捕的动作,或者风格化的动作。这里又会产生两个问题:
如果不好动捕的动作要应用,那么训练数据从哪里来?毕竟,Data-Driven IK是要训练一个隐空间分布的。这好像是一个先有鸡还是先有蛋的问题。笔者的意见是,还是得先有人制作动画,作为训练数据(人造鸡)。然后再有蛋(Data-Driven IK),后面就可以有各种自动鸡了。
对于风格化动作的生成,当然一种方法是,直接用风格化数据训练,比如本文这样。另一种方法是迁移学习,训练一个style transfer的模型,直接把动捕数据迁移成风格化的数据。后一种方法仿佛更可行,毕竟动捕数据可以认为是无限的啊,但是风格化动作生产可就太费劲了。
这样一看,好像也就只能用于二手生产,没啥其它用。引申一下,这就是机器学习对于图形学应用的一个重要障碍。
图形学,或者说艺术中的一个问题是“创造”。机器学习能做的是举一反三。生成式模型(VAE, GAN)通过学习很多数据,来生成符合学习过的数据分布中合理的插值或者外推的数据。但目前看,它还不能“举一”,或者说“举一”的效果和人类艺术家相比相差甚远。
以及,很多情况下,直接让人类艺术家创造出的东西,比机器学习创造的更加可控,更加合理,更加便宜。那用机器学习的意义在何?
6. 参考资料
Grochow, Keith, et al. “Style-based inverse kinematics.” ACM SIGGRAPH 2004 Papers. 2004. 522-531.
Aristidou, Andreas, and Joan Lasenby. “FABRIK: A fast, iterative solver for the Inverse Kinematics problem.” Graphical Models 73.5 (2011): 243-260.
Aristidou, Andreas, et al. “Inverse kinematics techniques in computer graphics: A survey.” Computer Graphics Forum. Vol. 37. No. 6. 2018.
Canutescu, Adrian A., and Roland L. Dunbrack Jr. “Cyclic coordinate descent: A robotics algorithm for protein loop closure.” Protein science 12.5 (2003): 963-972.
Pavlakos, Georgios, et al. “Expressive body capture: 3d hands, face, and body from a single image.” Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition. 2019.
Holden, Daniel, Taku Komura, and Jun Saito. “Phase-functioned neural networks for character control.” ACM Transactions on Graphics (TOG) 36.4 (2017): 1-13.
https://www.gameanim.com/2016/05/03/motion-matching-ubisofts-honor/
http://www.andreasaristidou.com/FABRIK.html
VPoser https://github.com/nghorbani/human_body_prior
SMPL-torch https://github.com/CalciferZh/SMPL